모션캡처 스튜디오에서 배우가 슈트를 입고 움직이면 화면 속 캐릭터가 실시간으로 따라 움직입니다. 간단해 보이지만, 그 뒤에는 카메라 하드웨어 → 네트워크 전송 → 2D 영상 처리 → 3D 복원 → 스켈레톤 솔빙 → 실시간 스트리밍이라는 정밀한 기술 파이프라인이 돌아가고 있습니다.
이 글에서는 광학식 모션캡처(OptiTrack 기준)의 전체 파이프라인을 단계별로 해부합니다.
1단계: 카메라 설치와 배치 전략
광학식 모션캡처의 첫 번째 단계는 카메라를 어디에, 어떻게 배치하느냐입니다.

배치 원칙
- 높이: 보통 2~3m 높이에 설치하며, 30도 정도 아래를 향하도록 각도를 잡습니다
- 배치 형태: 캡처 볼륨(촬영 공간) 둘레를 감싸는 링(Ring) 형태로 배치
- 2단 배치: 높은 위치와 낮은 위치에 카메라를 교차 배치하면 수직 방향 커버리지가 향상됩니다
- 중첩(Overlap): 캡처 볼륨 내의 모든 지점이 최소 3대 이상의 카메라에 동시에 보여야 합니다. 삼각측량에는 최소 2대가 필요하지만, 3대 이상이면 정확도와 오클루전 대응력이 크게 올라갑니다
카메라 수와 정확도의 관계
카메라 수가 많을수록:
- 사각지대가 줄어듦 → 오클루전 발생 확률 감소
- 같은 마커를 보는 카메라가 많아짐 → 삼각측량 정확도 향상
- 일부 카메라에 문제가 생겨도 다른 카메라가 보완 (리던던시)
밍글 스튜디오의 경우 OptiTrack Prime 17 × 16대 + Prime 13 × 14대, 총 30대를 8m × 7m 공간에 배치하여 360도 사각지대를 최소화하고 있습니다.
IR 패스 필터 — 적외선만 보는 눈
모션캡처 카메라 렌즈 앞에는 **IR 패스 필터(적외선 통과 필터)**가 장착되어 있습니다. 이 필터는 가시광선을 차단하고 적외선 파장(850nm 부근)만 통과시킵니다. 덕분에 형광등, 햇빛, 모니터 빛 등 일반 조명에 의한 간섭이 원천 차단되고, 카메라는 오직 IR LED에 반사된 마커 빛만 감지할 수 있습니다.
촬영 공간의 조명을 완전히 끌 필요가 없는 이유도 이 필터 덕분입니다. 다만 직사광선이나 강한 IR 성분을 포함한 조명은 간섭을 일으킬 수 있어, 스튜디오 환경에서는 IR 간섭이 적은 조명을 사용합니다.
프레임 동기화 — 30대 카메라가 동시에 찍는 법
삼각측량이 정확하려면 모든 카메라가 정확히 같은 순간에 셔터를 눌러야 합니다. 카메라마다 제각각 다른 타이밍에 촬영하면 빠르게 움직이는 마커의 위치가 카메라별로 달라져 3D 복원이 부정확해집니다.
OptiTrack은 하드웨어 동기화(Hardware Sync) 방식을 사용합니다. 한 대의 카메라가 **Sync Master(동기 마스터)**로 지정되어 타이밍 신호를 생성하고, 나머지 카메라들이 이 신호에 맞춰 동시에 노출합니다.
- Ethernet 카메라(Prime 시리즈): 동기 신호가 이더넷 연결 자체에 내장되어 있거나, OptiTrack의 eSync 허브를 통해 전달됩니다. 별도 동기 케이블이 필요 없습니다.
- USB 카메라(Flex 시리즈): 카메라 간에 전용 동기 케이블을 데이지 체인으로 연결합니다.
이 동기화의 정밀도는 마이크로초(μs) 단위로, 30대 카메라가 사실상 완벽히 같은 순간에 촬영합니다.
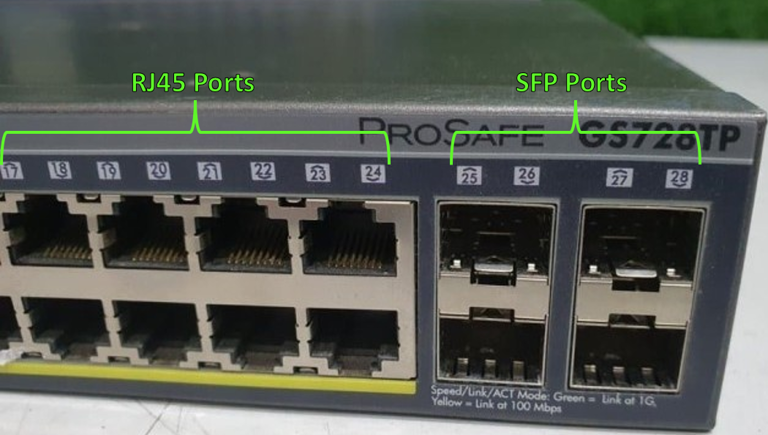
2단계: PoE — 하나의 케이블로 전력과 데이터를 동시에
PoE(Power over Ethernet)란?
OptiTrack Prime 시리즈 카메라는 PoE(Power over Ethernet) 방식으로 연결됩니다. 일반 이더넷 케이블(Cat5e/Cat6) 한 줄로 전력 공급과 데이터 전송을 동시에 처리하는 기술입니다.
기술 표준
| 표준 | 최대 전력 | 비고 |
|---|---|---|
| IEEE 802.3af (PoE) | 포트당 15.4W | 기본 모션캡처 카메라에 충분 |
| IEEE 802.3at (PoE+) | 포트당 25.5W | 고프레임레이트 카메라나 IR LED 출력이 높은 경우 |
OptiTrack 카메라는 보통 5~12W 정도를 소비하므로 PoE 표준 범위 내에서 충분히 동작합니다.
네트워크 토폴로지
카메라는 스타(Star) 토폴로지로 연결됩니다. 각 카메라가 PoE 스위치의 개별 포트에 1:1로 연결되는 구조입니다. 데이지 체인(직렬 연결)은 사용하지 않습니다.
30대 카메라라면 24포트 + 8포트 PoE+ 스위치를 조합하거나 48포트 스위치를 사용합니다. 스위치 선택 시 총 PoE 전력 예산(예: 30대 × 12W = 360W)을 확인해야 합니다.
PoE의 장점
- 케이블 1개로 해결 — 천장에 설치된 카메라마다 전원 어댑터를 따로 연결할 필요 없음
- 깔끔한 시공 — 케이블 수가 절반으로 줄어 설치와 관리가 간편
- 중앙 전원 관리 — 스위치에서 카메라 전원을 일괄 ON/OFF 가능
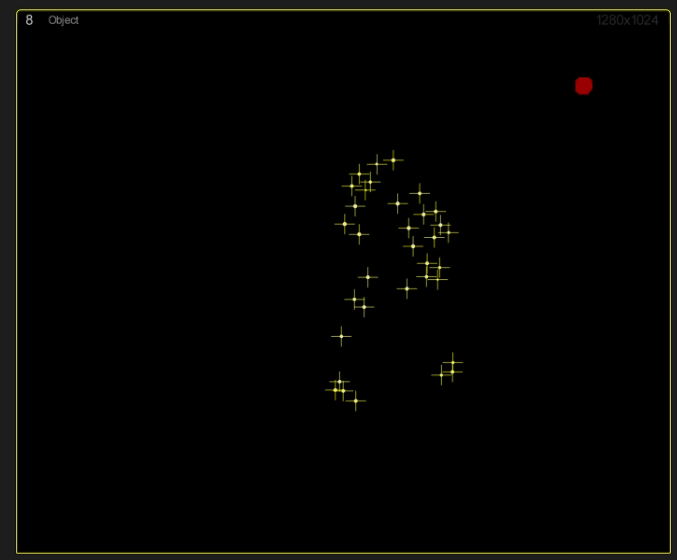
3단계: 카메라가 보내는 데이터 — 2D 센트로이드
카메라에서 PC로 전송되는 데이터가 무엇인지 이해하는 것이 파이프라인의 핵심입니다.
카메라 내부 처리 과정
각 OptiTrack 카메라에는 적외선(IR) LED 링이 카메라 렌즈 주변에 장착되어 있습니다. 이 LED가 적외선을 쏘면, 배우 몸에 부착된 재귀반사 마커가 빛을 카메라 방향으로 반사합니다. 카메라 센서는 이 반사광을 그레이스케일 IR 이미지로 촬영합니다.
여기서 중요한 점은, 카메라가 이 이미지를 그대로 PC에 보내지 않는다는 것입니다. 카메라 내부 프로세서가 먼저 처리합니다:
1. 스레시홀딩(Thresholding) 밝기가 일정 기준(임계값) 이상인 픽셀만 남기고 나머지를 제거합니다. 적외선을 반사하는 마커만 밝게 빛나므로, 배경과 마커를 분리하는 과정입니다.
2. 블롭 검출(Blob Detection) 밝은 픽셀들이 모여 있는 영역(블롭)을 하나의 마커 후보로 인식합니다.
3. 2D 센트로이드 계산 각 블롭의 **정확한 중심점(센트로이드)**을 서브픽셀 정밀도(약 0.1픽셀)로 계산합니다. 블롭 내 각 픽셀의 밝기를 가중치로 사용하는 가중 평균 방식입니다.
PC로 전송되는 데이터
기본 트래킹 모드에서 카메라가 PC로 보내는 것은 2D 센트로이드 데이터입니다:
- 각 마커 후보의 (x, y) 좌표 + 크기 정보
- 카메라 1대당 프레임당 수백 바이트 수준의 매우 작은 데이터
이렇게 작은 데이터량 덕분에 40대 이상의 카메라가 기가비트 이더넷 하나로도 충분합니다. 원시 그레이스케일 이미지를 전송할 수도 있지만(디버깅/시각화용), 이 경우 카메라당 수 MB/s가 필요하므로 일반 트래킹에서는 사용하지 않습니다.
즉, 카메라는 "영상을 찍어서 보내는 장치"가 아니라 **"마커 위치를 계산해서 좌표만 보내는 센서"**에 가깝습니다.
여기서 한 가지 의문이 들 수 있습니다 — 왜 모션캡처 카메라는 일반 카메라에 비해 그렇게 비쌀까? 이유는 위에서 설명한 과정에 있습니다. 일반 카메라는 찍은 영상을 그대로 보내면 끝이지만, 모션캡처 카메라는 내부에 전용 프로세서를 탑재하고 있어서 스레시홀딩, 블롭 검출, 서브픽셀 센트로이드 계산까지 초당 240~360프레임으로 실시간 처리합니다. 카메라 한 대가 사실상 영상 처리 전용 소형 컴퓨터를 품고 있는 셈이죠.
4단계: 캘리브레이션 — 카메라의 눈을 정렬하다
3D 복원을 하기 전에 반드시 거쳐야 하는 과정이 있습니다. 소프트웨어가 각 카메라의 정확한 위치, 방향, 렌즈 특성을 파악하는 **캘리브레이션(Calibration)**입니다.
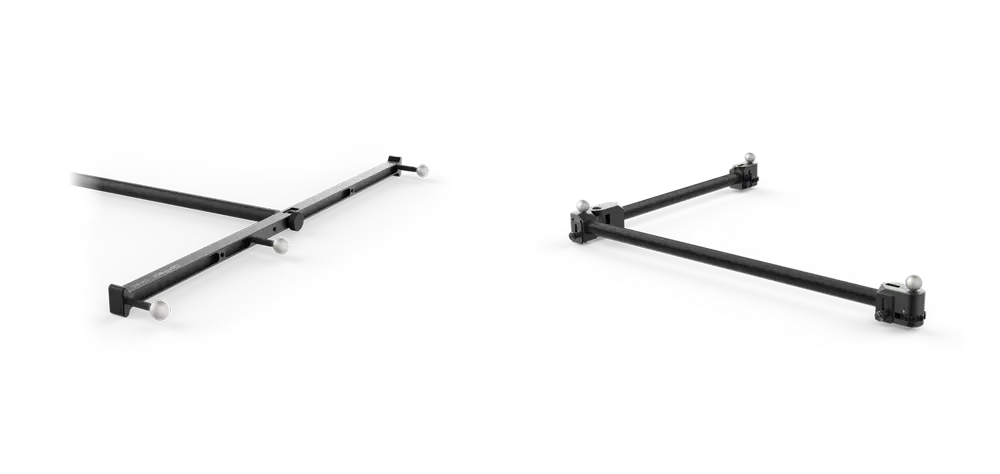
완딩(Wanding) — 공간을 스캔하다
오퍼레이터가 LED 또는 마커가 부착된 **캘리브레이션 완드(Wand, 막대)**를 들고 캡처 볼륨 전체를 걸어다니며 휘두릅니다. 완드의 마커 간 거리는 정확히 알려져 있기 때문에, 각 카메라가 완드를 수천 프레임 동안 촬영하면 소프트웨어가 다음을 계산할 수 있습니다:
- 내부 파라미터(Intrinsic Parameters) — 초점 거리, 렌즈 왜곡 계수 등 카메라 렌즈 고유의 특성
- 외부 파라미터(Extrinsic Parameters) — 3D 공간에서 카메라의 정확한 위치와 방향
이 계산에는 **번들 조정(Bundle Adjustment)**이라는 최적화 알고리즘이 사용됩니다. 수천 개의 2D 관측 데이터를 기반으로 모든 카메라의 파라미터를 동시에 최적화하는 과정입니다.
그라운드 플레인 설정
완딩이 끝나면 바닥에 **L자형 캘리브레이션 프레임(Ground Plane)**을 놓습니다. 이 프레임의 마커 3개 이상이 바닥면과 좌표 원점을 정의합니다:
- 어디가 (0, 0, 0)인지 (원점)
- 어느 방향이 X, Y, Z 축인지
- 바닥면의 높이 기준
이렇게 캘리브레이션이 완료되면, 소프트웨어는 어떤 카메라의 2D 좌표든 정확한 3D 광선으로 변환할 수 있게 됩니다.
캘리브레이션 품질
Motive 소프트웨어는 캘리브레이션 후 각 카메라의 **재투영 오차(Reprojection Error)**를 표시합니다. 이 값이 작을수록(보통 0.5px 이하) 캘리브레이션이 정확하다는 의미입니다. 오차가 큰 카메라는 위치를 조정하거나 재캘리브레이션합니다.
5단계: 2D → 3D 복원 (삼각측량)
PC에 도착한 2D 센트로이드들이 어떻게 3D 좌표로 변환되는지 살펴봅니다.
삼각측량(Triangulation) 원리
- 캘리브레이션으로 확보한 각 카메라의 정확한 3D 위치, 방향, 렌즈 특성을 활용합니다
- 카메라의 2D 센트로이드 좌표에서 **광선(Ray)**을 쏩니다 — 카메라 위치에서 센트로이드 방향으로 3D 공간을 향해 뻗어나가는 직선
- 같은 마커를 본 2대 이상의 카메라에서 쏜 광선들이 교차하는 점이 곧 마커의 3D 좌표입니다
실제로는 완벽히 교차하지 않는다
노이즈, 렌즈 왜곡, 캘리브레이션 오차 등으로 인해 광선들이 정확히 한 점에서 만나는 경우는 거의 없습니다. 그래서 **최소자승법(Least Squares Optimization)**을 사용합니다:
- 모든 광선까지의 거리 합이 최소가 되는 3D 좌표를 계산
- 이때 각 광선과 복원된 3D 점 사이의 거리를 **잔차(Residual)**라고 합니다
- 잔차가 작을수록 복원 품질이 좋다는 의미 — 잘 캘리브레이션된 OptiTrack 시스템에서는 서브밀리미터(0.5mm 이하) 수준의 잔차를 기대할 수 있습니다
카메라 수의 영향
| 해당 마커를 보는 카메라 수 | 효과 |
|---|---|
| 2대 | 3D 복원 가능 (최소 조건) |
| 3대 | 정확도 향상 + 1대가 가려져도 추적 유지 |
| 4대 이상 | 높은 정확도 + 강한 오클루전 내성 |
6단계: 마커 식별과 라벨링
마커 슈트와 마커 배치
3D 복원을 의미 있는 모션 데이터로 만들려면, 마커가 신체의 정확한 위치에 부착되어야 합니다.
마커 사양
- 지름: 보통 12~19mm의 구형 재귀반사 마커 사용
- 재질: 3M 재귀반사 테이프로 코팅된 폼/플라스틱 구
- 부착: 벨크로(찍찍이), 양면 테이프, 또는 전용 마커 슈트에 미리 장착
마커셋 규격 마커를 어디에 몇 개 붙이느냐는 표준화된 마커셋(Markerset) 규격을 따릅니다:
- Baseline (37 마커) — OptiTrack 기본 전신 마커셋. 상체, 하체, 머리를 커버하며, 게임/영상 모션캡처에 가장 많이 사용
- Baseline + Fingers (~57 마커) — 위에 손가락 마커 약 20개를 추가한 확장형
- Helen Hayes (~15-19 마커) — 의료/보행 분석 표준. 하체 중심의 최소 마커셋
마커는 뼈가 튀어나온 해부학적 랜드마크(견봉, 외측 상과, 전상장골극 등)에 부착합니다. 이런 위치는 피부 위에서 뼈의 움직임을 가장 정확히 반영하고, 피부 미끄러짐(Skin Artifact)이 최소화되는 지점입니다.
3D 복원이 끝나면 매 프레임마다 **이름 없는 3D 점들의 구름(Point Cloud)**이 생성됩니다. "이 점이 왼쪽 무릎 마커인지, 오른쪽 어깨 마커인지"를 판별하는 과정이 **라벨링(Labeling)**입니다.
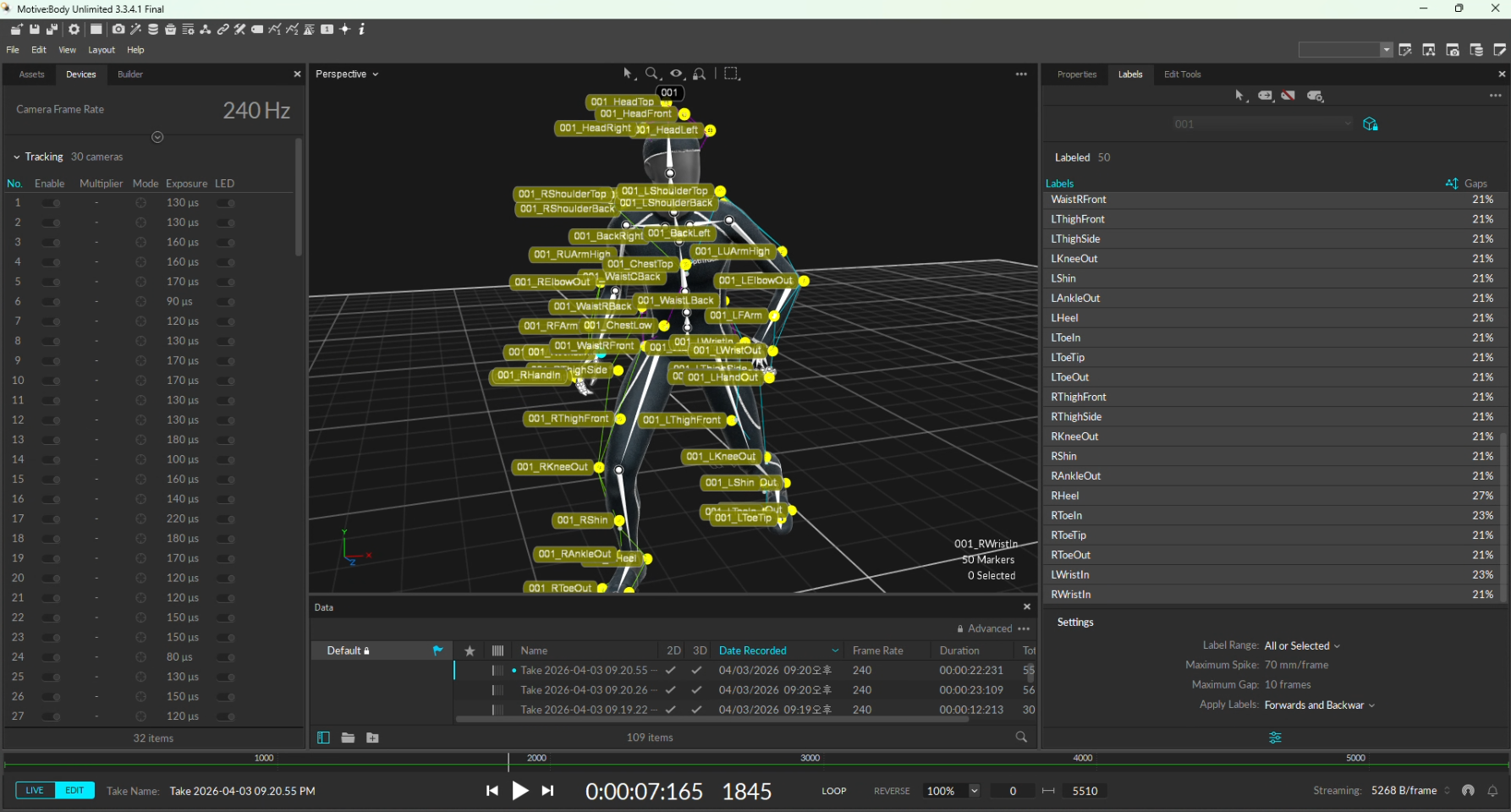
라벨링 알고리즘
템플릿 매칭(Template Matching) 캘리브레이션 시 정의한 마커셋의 기하학적 배치(예: 무릎과 발목 마커 사이 거리)를 기준으로, 현재 프레임의 3D 점들을 템플릿과 대조합니다.
예측 추적(Predictive Tracking) 이전 프레임의 속도·가속도를 기반으로 다음 프레임에서 각 마커가 어디에 있을지 예측하고, 가장 가까운 3D 점을 매칭합니다.
마커 스왑(Swap) 문제
두 마커가 서로 매우 가까이 지나갈 때, 소프트웨어가 두 마커의 라벨을 뒤바꿔 버리는 현상입니다. 광학식 모캡에서 가장 흔한 아티팩트 중 하나입니다.
해결 방법:
- 후처리에서 수동으로 라벨을 교정
- 마커 배치를 비대칭으로 설계하여 구분을 쉽게 함
- 액티브 마커(Active Marker) 사용 — 각 마커가 고유한 적외선 패턴을 발광하여 하드웨어 수준에서 식별, 스왑이 원천 차단됨
패시브 vs 액티브 마커
| 구분 | 패시브 마커 (반사형) | 액티브 마커 (발광형) |
|---|---|---|
| 원리 | 카메라 IR LED의 빛을 반사 | 마커 자체가 고유 IR 패턴 발광 |
| 식별 | 소프트웨어 기반 (스왑 가능성 있음) | 하드웨어 기반 (스왑 없음) |
| 장점 | 가볍고 저렴, 부착 간편 | 자동 식별, 라벨링 오류 없음 |
| 단점 | 라벨링 후처리 필요할 수 있음 | 무겁고, 배터리/전원 필요 |
대부분의 엔터테인먼트/VTuber 현장에서는 패시브 마커가 주로 사용됩니다. 가볍고 편하며, 소프트웨어 성능이 충분히 좋아 대부분의 상황에서 자동 라벨링이 잘 작동하기 때문입니다.
7단계: 스켈레톤 솔빙 — 점에서 뼈대로
라벨링된 3D 마커들을 사람의 골격(Skeleton) 구조에 매핑하는 단계입니다.
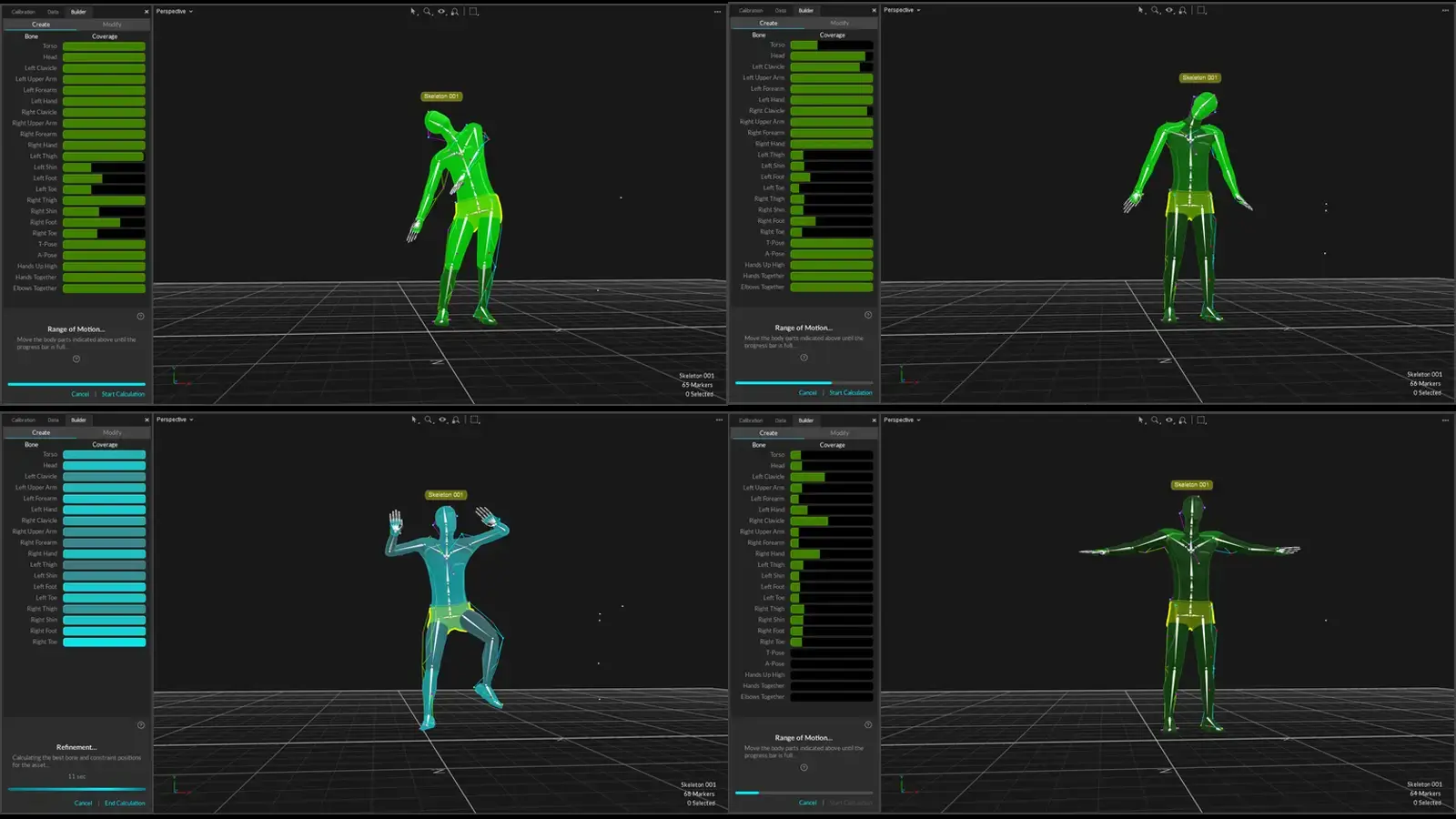
사전 캘리브레이션
촬영 전에 배우가 T-포즈(팔을 벌린 자세)를 취하면, 소프트웨어가 마커 위치를 기반으로 각 뼈대 길이(팔 길이, 다리 길이 등)와 관절 위치를 계산합니다.
이어서 ROM(Range of Motion) 캡처를 수행합니다.
실시간 솔빙
촬영 중에는 매 프레임마다:
- 라벨링된 3D 마커 좌표를 받아옴
- 마커 위치를 기반으로 각 관절의 **3D 위치와 회전값(Rotation)**을 계산
- 역운동학(Inverse Kinematics) 등의 알고리즘으로 자연스러운 골격 포즈를 산출
- 결과: 시간축 위의 모든 관절에 대한 위치(Translation) + 회전(Rotation) 데이터
리지드 바디 트래킹 (소품 추적)
칼, 총, 카메라 등 소품에 3개 이상의 마커를 비대칭으로 부착하면, 소프트웨어가 해당 마커 클러스터를 하나의 강체(Rigid Body)로 인식하여 6DOF(위치 3축 + 회전 3축) 추적이 가능합니다.
8단계: 실시간 스트리밍과 데이터 출력
실시간 스트리밍

OptiTrack Motive는 솔빙된 데이터를 실시간으로 외부 소프트웨어에 전달합니다:
- NatNet SDK — OptiTrack의 자체 프로토콜, UDP 기반으로 저지연 전송
- VRPN — VR/모캡 분야의 표준 프로토콜
이를 통해 Unity, Unreal Engine, MotionBuilder 등에서 실시간으로 캐릭터를 움직일 수 있습니다. VTuber 라이브 방송이 가능한 것도 이 실시간 스트리밍 덕분입니다.
녹화 데이터 출력 포맷
| 포맷 | 용도 |
|---|---|
| FBX | 스켈레톤 + 애니메이션 데이터, 게임 엔진/DCC 툴 호환 |
| BVH | 계층적 모션 데이터, 리타게팅에 주로 사용 |
| C3D | 원시 3D 마커 데이터, 바이오메카닉스/연구 표준 |
9단계: 후처리 — 데이터를 다듬는 과정
실시간 캡처에서 얻은 데이터는 바로 최종 결과물로 쓸 수 있는 경우도 있지만, 대부분의 프로 작업에서는 후처리(Post-Processing) 과정을 거칩니다.
갭 필링(Gap Filling)
오클루전으로 인해 마커가 일시적으로 사라진 구간을 **보간(Interpolation)**으로 채우는 작업입니다.
- 선형 보간(Linear) — 단순히 앞뒤 프레임을 직선으로 이음. 짧은 갭에 적합
- 스플라인 보간(Spline) — 곡선으로 부드럽게 채움. 자연스러운 동작 유지에 유리
- 패턴 기반 보간 — 같은 동작을 반복한 다른 테이크의 데이터를 참조하여 채움
갭이 길수록 보간 정확도가 떨어지기 때문에, 촬영 시 오클루전을 최소화하는 것이 가장 중요합니다.
스무딩(Smoothing)과 필터링
캡처된 데이터에는 미세한 떨림(High-frequency Noise)이 포함될 수 있습니다. 이를 제거하기 위해:
- 버터워스 필터(Butterworth Filter) — 지정한 주파수 이상의 노이즈를 제거하는 저역 통과 필터
- 가우시안 스무딩 — 주변 프레임의 가중 평균으로 떨림을 완화
다만 과도한 스무딩은 동작의 디테일과 임팩트를 잃게 만들므로, 칼을 휘두르는 순간의 날카로운 움직임까지 뭉개지지 않도록 적절한 강도를 설정해야 합니다.
마커 스왑 교정
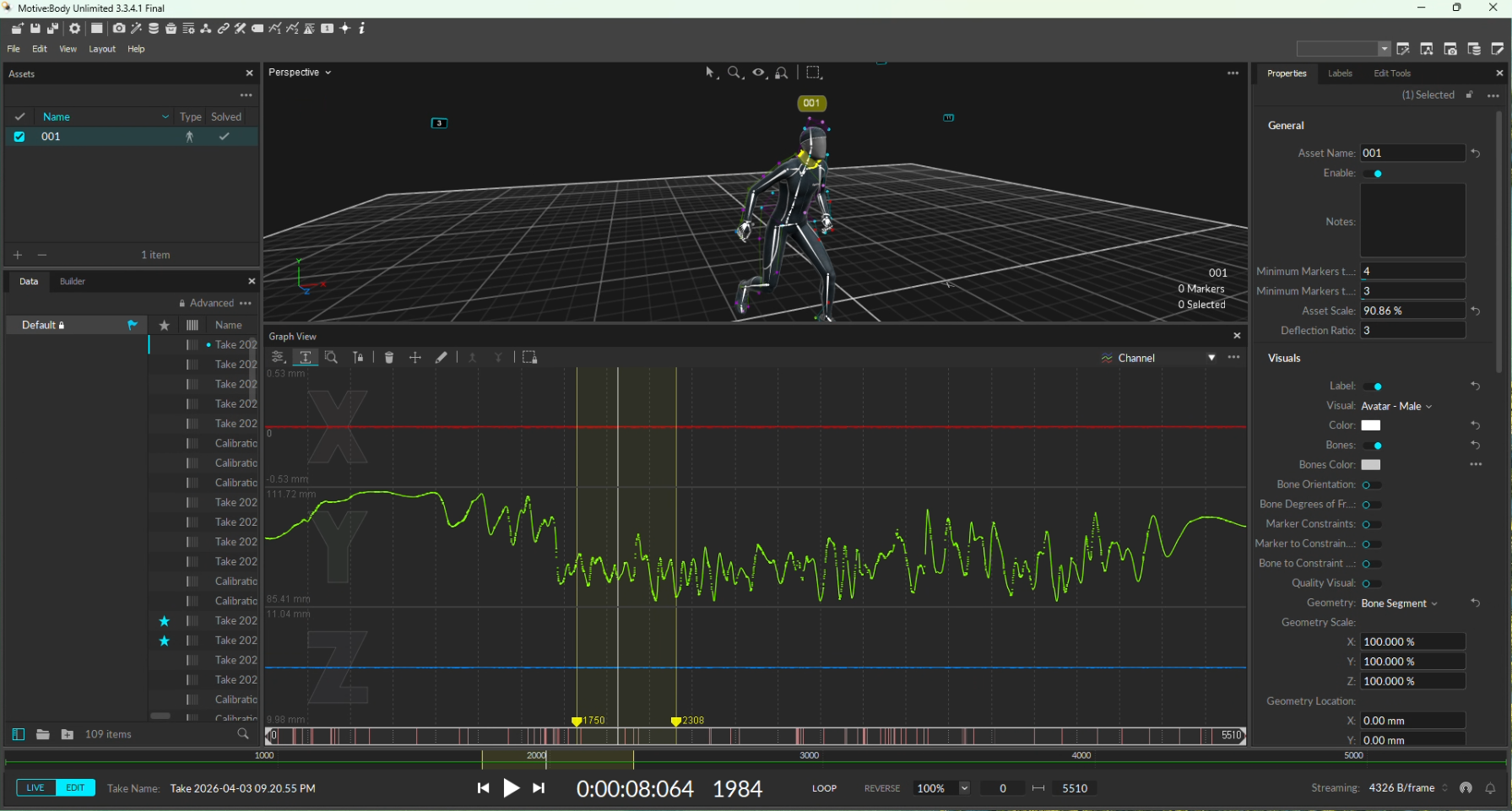
6단계에서 설명한 마커 스왑이 발생한 구간을 찾아서 라벨을 수동으로 바로잡는 작업입니다. Motive에서는 타임라인 위에서 마커 궤적을 시각적으로 확인하며 교정할 수 있습니다.
리타게팅(Retargeting)
캡처된 스켈레톤 데이터를 다른 비율의 캐릭터에 적용하는 과정입니다. 예를 들어 키 170cm인 배우의 모션 데이터를 키 3m인 거인 캐릭터나 150cm인 어린이 캐릭터에 맞추려면, 관절 회전은 유지하면서 뼈대 길이를 대상 캐릭터에 맞게 재계산해야 합니다. MotionBuilder, Maya, Unreal Engine 등에서 리타게팅 기능을 제공합니다.
10단계: 현장에서 자주 발생하는 문제와 대응
기술적으로 완벽해 보이는 광학식 모캡에도 실무 현장에서 마주치는 문제들이 있습니다.
반사 노이즈(Stray Reflections)
마커가 아닌 물체에서 적외선이 반사되어 **가짜 마커(Ghost Marker)**가 검출되는 현상입니다.
- 원인: 금속 표면, 반짝이는 옷, 안경, 시계, 바닥 반사 등
- 대응: 반사가 일어나는 표면을 무광 테이프로 가리거나, Motive에서 해당 영역을 마스킹(Masking) 처리하여 소프트웨어가 무시하도록 설정
마커 탈락
격렬한 동작 중에 마커가 슈트에서 떨어지거나 위치가 틀어지는 경우입니다.
- 대응: 촬영 전 마커 부착 상태를 꼼꼼히 확인하고, 격한 동작 촬영 시 벨크로 + 양면 테이프를 병행하여 고정력을 높입니다
- 중간중간 모니터링하며 마커 상태를 체크하는 것도 중요합니다
의상 제약
촬영 시 배우가 입는 옷은 밝은 색상·무광 소재가 이상적입니다. 검은색은 마커 반사에 영향이 없지만, 반짝이는 소재나 느슨한 옷은 마커 위치가 불안정해지거나 반사 노이즈를 유발할 수 있습니다. 전용 모캡 슈트를 착용하는 것이 가장 안정적입니다.
캘리브레이션 유지
캡처 볼륨 내 온도 변화, 카메라 진동, 삼각대 미세 이동 등으로 캘리브레이션이 서서히 틀어질 수 있습니다. 장시간 촬영 시에는 중간에 재캘리브레이션하거나, Motive의 Continuous Calibration(연속 캘리브레이션) 기능으로 실시간 보정하는 것이 좋습니다.
레이턴시 — 움직임에서 화면까지 얼마나 걸릴까?
전체 파이프라인의 각 단계별 소요 시간입니다.
| 단계 | 소요 시간 |
|---|---|
| 카메라 노출 (240fps 기준) | ~4.2ms |
| 카메라 내부 처리 (센트로이드 계산) | ~0.5–1ms |
| 네트워크 전송 (PoE → PC) | < 1ms |
| 3D 복원 + 라벨링 | ~1–2ms |
| 스켈레톤 솔빙 | ~0.5–1ms |
| 스트리밍 출력 (NatNet) | < 1ms |
| 총 종단간 레이턴시 | 약 8–14ms (240fps 기준) |
360fps에서는 노출 시간이 줄어 7ms 이하까지 가능합니다. 이 정도 레이턴시면 사람이 체감하기 어려운 수준이며, VTuber 라이브 방송에서도 자연스러운 실시간 반응이 가능합니다.
참고: 레이턴시의 대부분은 **카메라 노출 시간(프레임 주기)**이 차지합니다. 프레임레이트가 높을수록 레이턴시가 줄어드는 이유입니다.
전체 파이프라인 요약
30대 카메라를 링 형태로 배치, IR 패스 필터로 적외선만 감지, 하드웨어 싱크로 μs 단위 동기화
Cat6 한 줄로 전력 + 데이터 동시 전송, 스타 토폴로지로 스위치에 연결
IR LED 발사 → 마커 반사광 수신 → 스레시홀딩 → 블롭 검출 → 서브픽셀 센트로이드 계산 → 좌표만 전송
완딩으로 카메라 내부/외부 파라미터 산출, 그라운드 플레인으로 좌표계 정의
다수 카메라의 2D 좌표에서 광선 교차 + 최소자승법으로 3D 좌표 복원
템플릿 매칭 + 예측 추적으로 각 3D 점에 마커 이름 부여
T-포즈 + ROM 캘리브레이션 기반, 역운동학으로 관절 위치·회전 계산
NatNet/VRPN으로 Unity/Unreal/MotionBuilder에 실시간 전송, FBX/BVH/C3D 녹화
갭 필링 · 스무딩 · 마커 스왑 교정 · 리타게팅
게임 시네마틱 · VTuber 라이브 · 영상 콘텐츠에 적용 (총 레이턴시 약 8~14ms)
카메라가 찍은 영상이 그대로 PC에 오는 것이 아니라, 카메라가 직접 마커 좌표를 계산해서 보내고, PC는 이 좌표들을 3D로 복원하고 뼈대에 매핑하는 것 — 이것이 광학식 모션캡처의 핵심 원리입니다.
자주 묻는 질문 (FAQ)
Q. 광학식 모션캡처 카메라는 일반 카메라와 뭐가 다른가요?
일반 카메라는 풀컬러 영상을 촬영하지만, 모션캡처 카메라는 적외선(IR) 영역에 특화되어 있습니다. IR LED로 마커를 비추고 반사광만 감지하며, 카메라 내부에서 마커의 2D 좌표를 직접 계산하여 좌표 데이터만 PC에 전송합니다.
Q. PoE 케이블 길이에 제한이 있나요?
이더넷 표준에 따라 PoE 케이블은 최대 100m까지 지원됩니다. 대부분의 모션캡처 스튜디오에서는 이 범위를 충분히 충족합니다.
Q. 카메라 프레임레이트가 높을수록 항상 좋은가요?
프레임레이트가 높으면 빠른 동작 추적과 낮은 레이턴시에 유리하지만, 데이터 처리량이 늘어나고 카메라 해상도가 낮아질 수 있습니다. 일반적으로 VTuber 라이브나 게임 모션캡처에서는 120~240fps면 충분하며, 스포츠 과학 등 초고속 동작 분석에서는 360fps 이상을 사용합니다.
Q. 마커 스왑은 얼마나 자주 발생하나요?
마커셋이 잘 설계되어 있고 카메라 수가 충분하면 실시간 촬영 중 스왑은 드물게 발생합니다. 다만 빠른 동작이나 마커 간 거리가 가까운 동작(손 맞잡기 등)에서는 발생 확률이 올라가며, 이런 구간은 후처리에서 교정합니다.
Q. 삼각측량에 2대면 충분한데 왜 30대나 설치하나요?
2대는 이론적 최솟값일 뿐입니다. 실제로는 오클루전(마커 가림), 카메라 각도에 따른 정확도 차이, 리던던시 확보 등을 고려해야 합니다. 30대를 배치하면 어떤 마커든 항상 다수의 카메라가 보고 있으므로, 안정적이고 정확한 추적이 가능합니다.
Q. 캘리브레이션은 얼마나 자주 해야 하나요?
일반적으로 촬영일 시작 전에 한 번 수행합니다. 다만 장시간 촬영 시 온도 변화나 카메라 미세 이동으로 캘리브레이션이 틀어질 수 있어, 4~6시간 연속 촬영 시 중간에 재캘리브레이션을 권장합니다. OptiTrack Motive의 Continuous Calibration 기능을 사용하면 촬영 중에도 실시간으로 보정이 가능합니다.
Q. 반짝이는 옷을 입으면 안 되나요?
모션캡처 카메라는 적외선 반사를 감지하기 때문에, 반짝이는 소재(금속 장식, 시퀸, 광택 있는 합성 섬유 등)는 적외선을 반사하여 가짜 마커(Ghost Marker)를 만들 수 있습니다. 전용 모캡 슈트나 무광 소재의 편안한 옷을 착용하는 것이 가장 좋습니다.
광학식 모션캡처의 기술적 구조에 대해 더 궁금한 점이 있으시면 문의 페이지에서 편하게 질문해 주세요. 밍글 스튜디오에서 직접 체험하고 싶으시다면 서비스 안내를 확인해 보세요.