在动作捕捉工作室中,当演员穿上动捕服进行表演时,屏幕上的角色会实时跟随其动作。看起来很简单,但其背后运行着一条精密的技术管线:摄像头硬件 → 网络传输 → 2D图像处理 → 3D重建 → 骨骼解算 → 实时串流。
本文将逐步剖析光学动作捕捉(以OptiTrack为基准)的完整管线。
第1步:摄像头安装与布局策略
光学动作捕捉的第一步是决定摄像头放在哪里、如何布置。

布局原则
- 高度:通常安装在2~3m高度,向下倾斜约30度
- 布局形态:围绕捕捉体积(拍摄空间)呈环形(Ring)布置
- 双层布局:在高位和低位交替放置摄像头,可提升垂直方向的覆盖范围
- 重叠(Overlap):捕捉体积内的每个点都必须同时被至少3台摄像头看到。三角测量最少需要2台,但3台以上能显著提升精度和遮挡应对能力
摄像头数量与精度的关系
摄像头数量越多:
- 盲区越少 → 遮挡发生概率降低
- 观测同一标记点的摄像头越多 → 三角测量精度提升
- 部分摄像头出现问题时其他摄像头可以补偿(冗余性)
明格工作室配备了OptiTrack Prime 17 × 16台 + Prime 13 × 14台,共30台摄像头布置在8m × 7m的空间中,最大限度地减少了360度盲区。
IR通过滤光片 — 只看红外线的眼睛
每台动作捕捉摄像头的镜头前方都安装了IR通过滤光片(红外通过滤光片)。该滤光片阻挡可见光,仅允许红外线波长(约850nm)通过。因此,荧光灯、阳光、显示器光线等普通照明的干扰被从根本上消除,摄像头只能检测到IR LED反射的标记点光线。
这也是拍摄空间不需要完全关灯的原因。不过,直射阳光或含有强IR成分的照明仍可能造成干扰,因此工作室环境中使用IR干扰较小的照明设备。
帧同步 — 30台摄像头如何同时拍摄
要使三角测量准确,所有摄像头必须在完全相同的时刻按下快门。如果各台摄像头在不同时间拍摄,快速运动的标记点位置会因摄像头而异,导致3D重建不准确。
OptiTrack采用硬件同步(Hardware Sync)方式。一台摄像头被指定为Sync Master(同步主机)生成时序信号,其余摄像头根据该信号同时曝光。
- 以太网摄像头(Prime系列):同步信号内嵌在以太网连接本身中,或通过OptiTrack的eSync集线器传输。无需单独的同步线缆。
- USB摄像头(Flex系列):摄像头之间通过专用同步线缆以菊花链方式连接。
该同步精度达到微秒(μs)级别,30台摄像头实际上在完全相同的时刻进行拍摄。
第2步:PoE — 一根线缆同时传输电力和数据
什么是PoE(Power over Ethernet)?
OptiTrack Prime系列摄像头通过PoE(Power over Ethernet)方式连接。这是一种通过标准以太网线缆(Cat5e/Cat6)同时提供电力和传输数据的技术。
技术标准
| 标准 | 最大功率 | 备注 |
|---|---|---|
| IEEE 802.3af (PoE) | 每端口15.4W | 足以满足基本动作捕捉摄像头 |
| IEEE 802.3at (PoE+) | 每端口25.5W | 适用于高帧率摄像头或IR LED输出较高的情况 |
OptiTrack摄像头通常功耗约5~12W,完全在PoE标准范围内。
网络拓扑
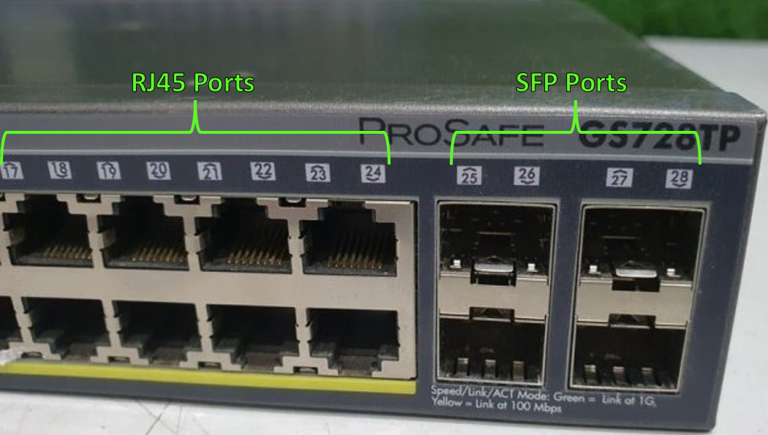
摄像头以星型(Star)拓扑方式连接。每台摄像头1对1连接到PoE交换机的独立端口。不使用菊花链(串行连接)。
如果有30台摄像头,可以组合使用24端口 + 8端口的PoE+交换机,或使用48端口交换机。选择交换机时必须确认PoE总功率预算(例如:30台 × 12W = 360W)。
PoE的优势
- 一根线缆搞定 — 无需为安装在天花板上的每台摄像头单独连接电源适配器
- 整洁的施工 — 线缆数量减半,安装和管理更加简便
- 集中电源管理 — 可从交换机统一控制摄像头的开关
第3步:摄像头发送的数据 — 2D质心
理解摄像头向PC发送的数据内容是管线的核心。
摄像头内部处理过程
每台OptiTrack摄像头的镜头周围都安装了红外(IR)LED环。这些LED发射红外线,演员身上的逆反射标记点将光线反射回摄像头方向。摄像头传感器将这些反射光拍摄为灰度IR图像。
这里的关键是,摄像头并不会将这张图像直接发送给PC。摄像头内部处理器会先进行处理:
1. 阈值处理(Thresholding) 只保留亮度超过一定阈值的像素,其余全部去除。由于只有反射红外线的标记点会发出明亮的光,这个过程实现了标记点与背景的分离。
2. 斑点检测(Blob Detection) 将明亮像素聚集的区域(斑点)识别为单个标记点候选。
3. 2D质心计算 以亚像素精度(约0.1像素)计算每个斑点的精确中心点(质心)。采用加权平均方法,以斑点内各像素的亮度作为权重。
发送给PC的数据
在默认追踪模式下,摄像头发送给PC的是2D质心数据:
- 每个标记点候选的(x, y)坐标 + 大小信息
- 每台摄像头每帧仅数百字节的极小数据量
正因为数据量如此之小,40台以上的摄像头仅需一条千兆以太网即可满足需求。也可以传输原始灰度图像(用于调试/可视化),但这种情况下每台摄像头需要数MB/s,因此在正常追踪中不使用。
也就是说,摄像头并不是"拍摄并发送视频的设备",更接近于"计算标记点位置并仅发送坐标的传感器"。
这里可能会产生一个疑问——为什么动作捕捉摄像头比普通摄像头贵那么多?原因就在于上面描述的处理过程。普通摄像头只需将拍摄的视频原样发送即可,而动作捕捉摄像头内置了专用处理器,能以每秒240~360帧的速度实时执行阈值处理、斑点检测和亚像素质心计算。每台摄像头实际上就是一台专门用于图像处理的小型计算机。
第4步:标定 — 对齐摄像头的视线
在进行3D重建之前,有一个必须经历的过程。软件需要了解每台摄像头的精确位置、方向和镜头特性 — 这就是标定(Calibration)。
挥棒(Wanding) — 扫描空间
操作员手持装有LED或标记点的标定棒(Wand),在整个捕捉体积范围内走动并挥舞。由于棒上标记点之间的距离是精确已知的,当各台摄像头拍摄标定棒数千帧后,软件可以计算出:
- 内参(Intrinsic Parameters) — 焦距、镜头畸变系数等摄像头镜头固有的特性
- 外参(Extrinsic Parameters) — 摄像头在3D空间中的精确位置和方向
该计算使用一种名为光束法平差(Bundle Adjustment)的优化算法。基于数千个2D观测数据,同时优化所有摄像头的参数。
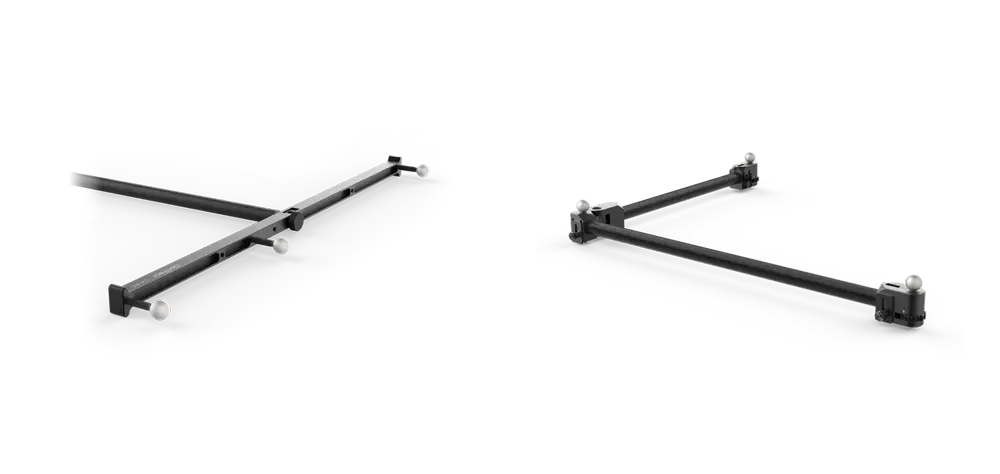
地面参考设置
挥棒完成后,在地板上放置一个L形标定框架(Ground Plane)。该框架上的3个或更多标记点定义了地面和坐标原点:
- 哪里是(0, 0, 0)(原点)
- 哪个方向是X、Y、Z轴
- 地面的高度基准
标定完成后,软件就能将任何摄像头的2D坐标转换为精确的3D射线。
标定质量
Motive软件在标定后会显示每台摄像头的重投影误差(Reprojection Error)。该值越小(通常0.5像素以下),表示标定越精确。误差较大的摄像头需要调整位置或重新标定。
第5步:2D → 3D重建(三角测量)
让我们看看到达PC的2D质心是如何转换为3D坐标的。
三角测量(Triangulation)原理
- 利用标定获得的每台摄像头的精确3D位置、方向和镜头特性
- 从摄像头的2D质心坐标发射一条射线(Ray) — 从摄像头位置沿质心方向延伸到3D空间的直线
- 观测同一标记点的2台或更多摄像头发射的射线交汇之处即为标记点的3D坐标
实际上射线并不会完美交汇
由于噪声、镜头畸变、标定误差等因素,射线几乎不可能精确交于一点。因此使用最小二乘法(Least Squares Optimization):
- 计算到所有射线距离之和最小的3D坐标
- 此时每条射线与重建的3D点之间的距离称为残差(Residual)
- 残差越小,重建质量越好 — 在标定良好的OptiTrack系统中,可以期望亚毫米级(0.5mm以下)的残差
摄像头数量的影响
| 观测该标记点的摄像头数 | 效果 |
|---|---|
| 2台 | 可以进行3D重建(最低条件) |
| 3台 | 精度提升 + 即使1台被遮挡也能维持追踪 |
| 4台以上 | 高精度 + 强遮挡抗性 |
第6步:标记点识别与标注
标记点服装与标记点布置
要将3D重建转化为有意义的动作数据,标记点必须贴在身体的精确位置上。
标记点规格
- 直径:通常使用12~19mm的球形逆反射标记点
- 材质:覆有3M逆反射胶带的泡沫/塑料球
- 固定方式:魔术贴、双面胶带,或预装在专用标记点服上
标记点集规格 标记点贴在哪里、贴几个,遵循标准化的标记点集(Markerset)规格:
- Baseline(37个标记点) — OptiTrack默认全身标记点集。覆盖上半身、下半身和头部,是游戏/影视动作捕捉中最常用的
- Baseline + Fingers(约57个标记点) — 在上述基础上增加约20个手指标记点的扩展版
- Helen Hayes(约15~19个标记点) — 医学/步态分析标准。以下半身为中心的最小标记点集
标记点贴在骨骼突出的解剖学标志点(肩峰、外侧上髁、髂前上棘等)。这些位置在皮肤上最能准确反映骨骼运动,且皮肤滑移(Skin Artifact)最小。
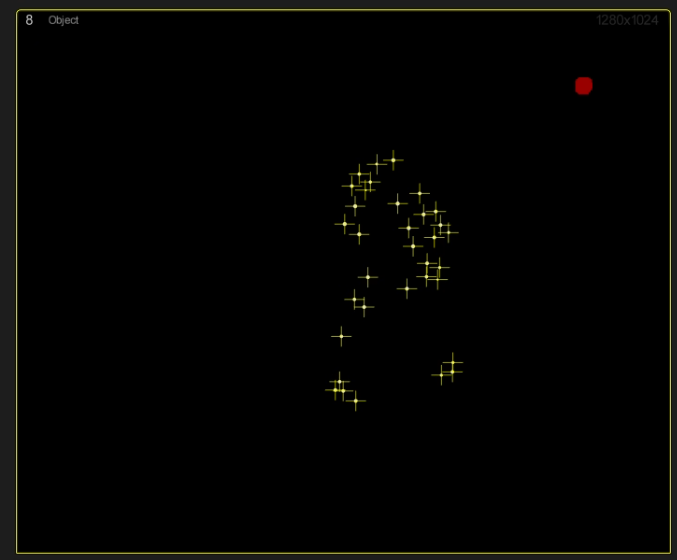
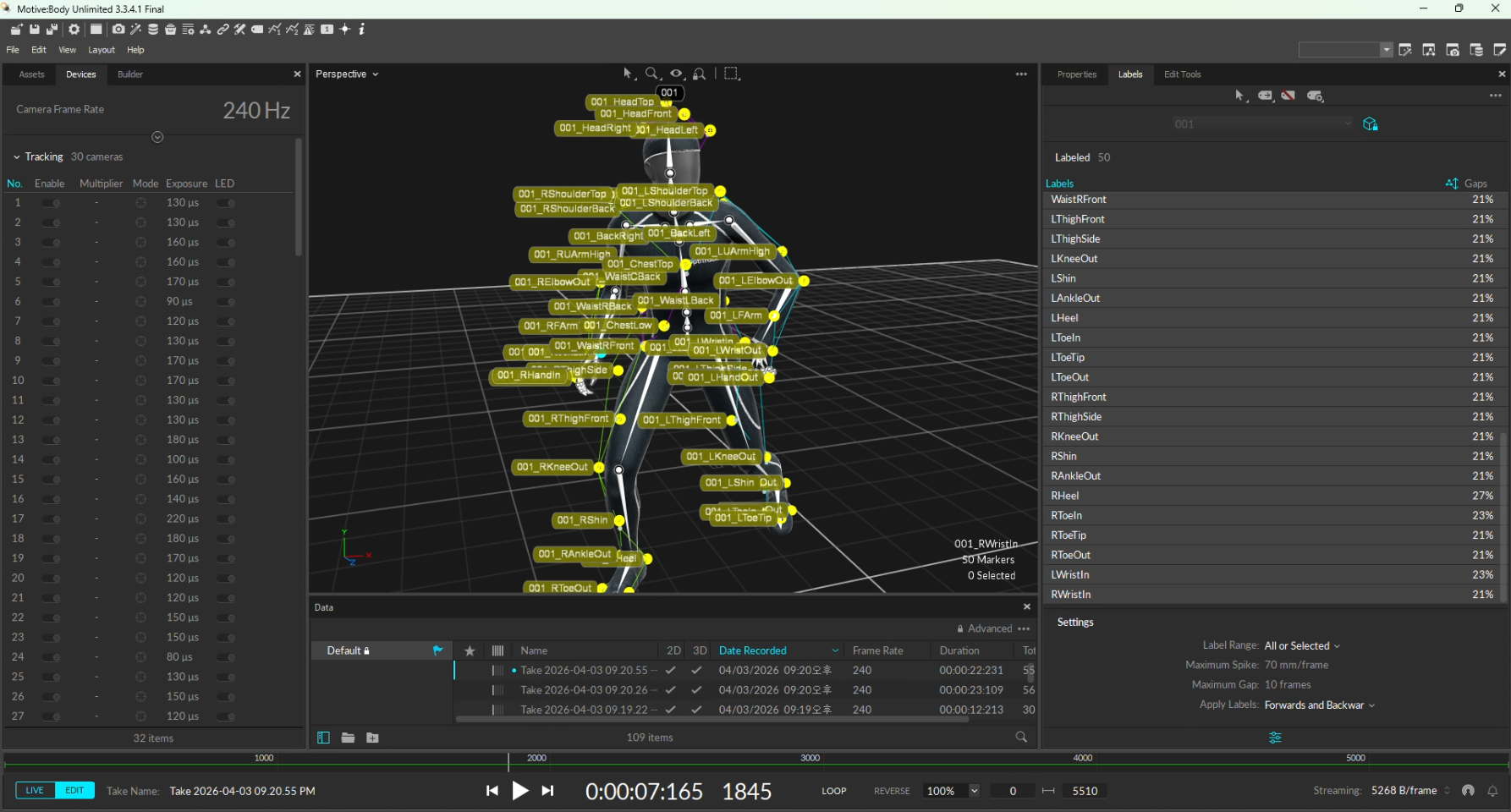
3D重建完成后,每一帧都会产生一团无名称的3D点云(Point Cloud)。判断"这个点是左膝标记点还是右肩标记点"的过程就是标注(Labeling)。
标注算法
模板匹配(Template Matching) 以标定时定义的标记点集的几何布局(如膝盖与踝关节标记点之间的距离)为基准,将当前帧的3D点与模板进行对照。
预测追踪(Predictive Tracking) 基于前一帧的速度和加速度,预测下一帧各标记点的位置,并与最近的3D点进行匹配。
标记点交换(Swap)问题
当两个标记点非常接近地经过彼此时,软件可能会交换两个标记点的标签 — 即标签互换现象。这是光学动捕中最常见的伪影之一。
解决方法:
- 在后处理中手动纠正标签
- 将标记点布置设计为不对称以便于区分
- 使用主动标记点(Active Marker) — 每个标记点发射独特的红外模式,在硬件层面实现识别,从根本上杜绝交换
被动标记点 vs 主动标记点
| 类别 | 被动标记点(反射型) | 主动标记点(发光型) |
|---|---|---|
| 原理 | 反射摄像头IR LED的光 | 标记点自身发射独特的IR模式 |
| 识别 | 基于软件(可能发生交换) | 基于硬件(无交换) |
| 优点 | 轻便、便宜、易于安装 | 自动识别、无标注错误 |
| 缺点 | 可能需要后处理标注 | 较重,需要电池/电源 |
在大多数娱乐/VTuber制作现场,主要使用被动标记点。因为它们轻便舒适,而且软件性能足够好,在大多数情况下自动标注都能良好运作。
第7步:骨骼解算 — 从点到骨架
将标注好的3D标记点映射到人体骨骼(Skeleton)结构的步骤。
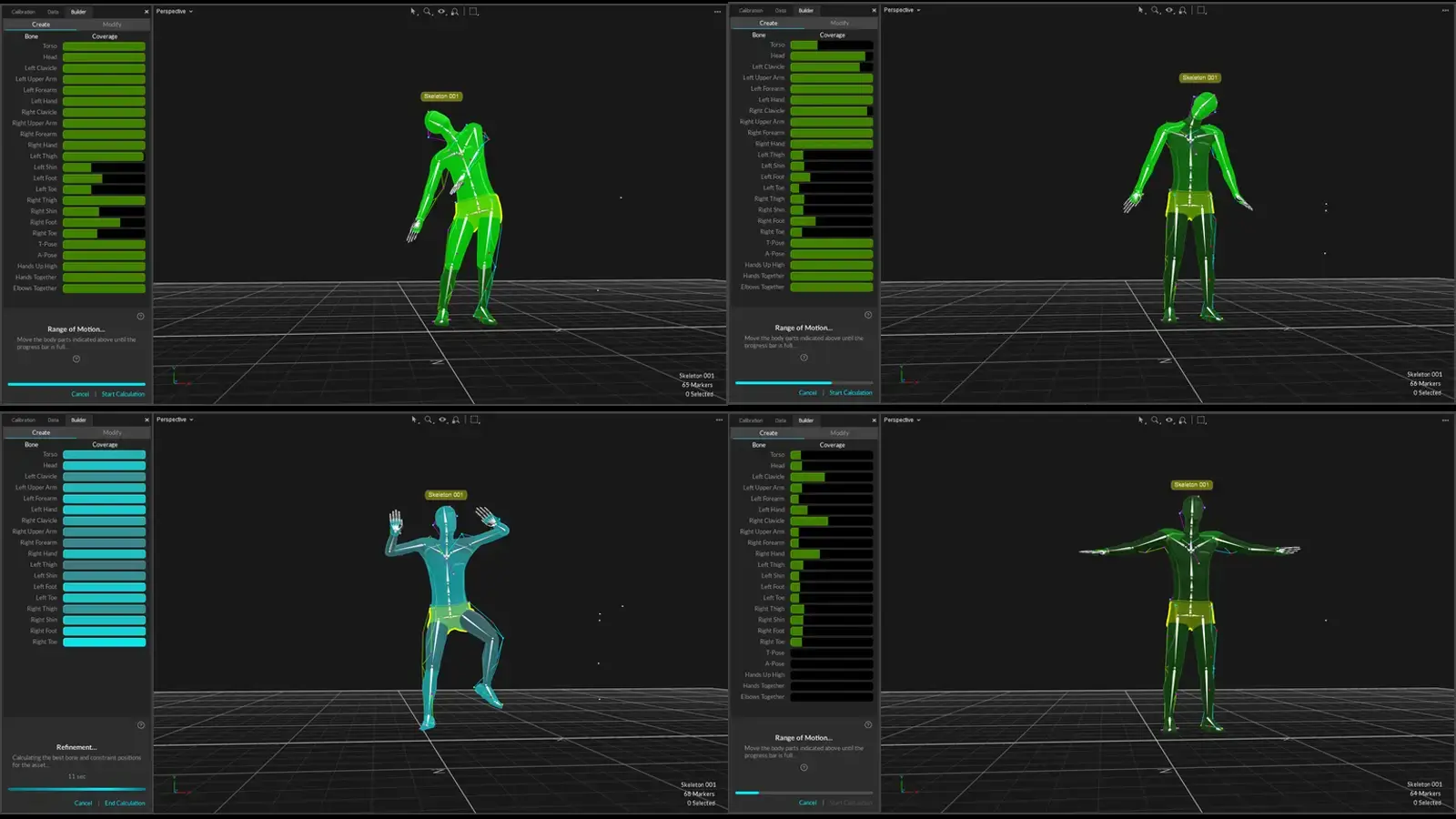
预标定
拍摄前,演员摆出T-Pose(双臂展开的姿势),软件根据标记点位置计算各骨骼长度(臂长、腿长等)和关节位置。
接着进行ROM(Range of Motion)捕捉。
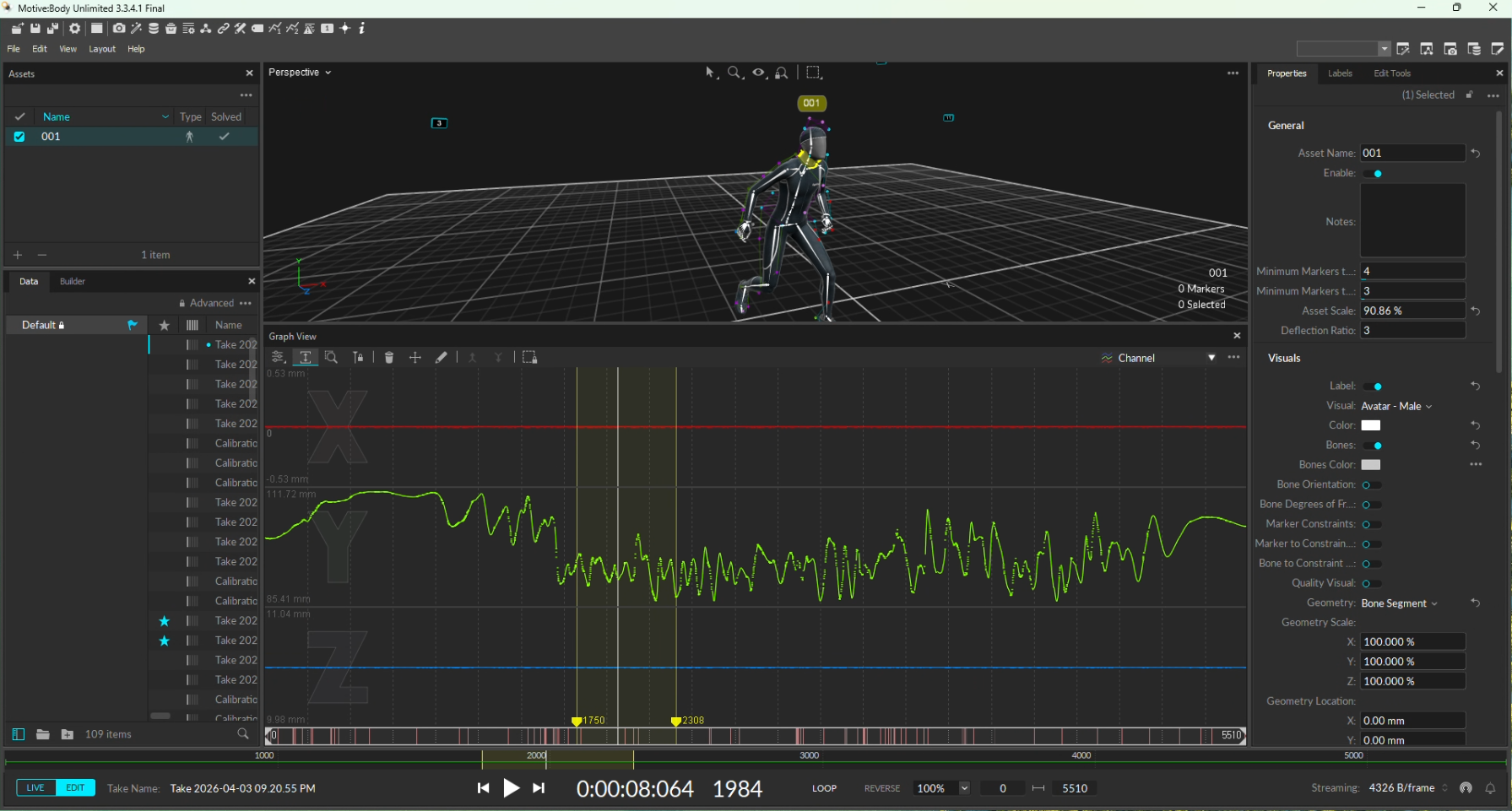
实时解算
拍摄过程中,每一帧都会:
- 接收标注后的3D标记点坐标
- 根据标记点位置计算各关节的3D位置和旋转值(Rotation)
- 通过逆运动学(Inverse Kinematics)等算法计算自然的骨骼姿态
- 结果:时间轴上所有关节的位置(Translation)+ 旋转(Rotation)数据
刚体追踪(道具追踪)
在刀、枪、摄像机等道具上不对称地贴上3个或更多标记点后,软件会将该标记点集群识别为一个刚体(Rigid Body),实现6DOF(3轴位置 + 3轴旋转)追踪。
第8步:实时串流与数据输出
实时串流

OptiTrack Motive将解算后的数据实时传递给外部软件:
- NatNet SDK — OptiTrack自有协议,基于UDP的低延迟传输
- VRPN — VR/动捕领域的标准协议
通过这些协议,可以在Unity、Unreal Engine、MotionBuilder等软件中实时驱动角色。VTuber直播之所以成为可能,也正是得益于这种实时串流。
录制数据输出格式
| 格式 | 用途 |
|---|---|
| FBX | 骨骼 + 动画数据,兼容游戏引擎/DCC工具 |
| BVH | 层级动作数据,主要用于重定向 |
| C3D | 原始3D标记点数据,生物力学/研究标准 |
第9步:后处理 — 打磨数据的过程
实时捕捉获取的数据有时可以直接使用,但大多数专业工作需要经过后处理(Post-Processing)阶段。
间隙填充(Gap Filling)
用插值(Interpolation)填补因遮挡导致标记点暂时消失的区间。
- 线性插值(Linear) — 简单地用直线连接前后帧。适用于短间隙
- 样条插值(Spline) — 用曲线平滑填充。有利于保持自然运动
- 基于模式的插值 — 参考重复相同动作的其他拍摄数据来填充
间隙越长,插值精度越低,因此拍摄时最大限度地减少遮挡才是最重要的。
平滑(Smoothing)与滤波
捕捉到的数据可能包含细微抖动(高频噪声)。为去除这些噪声:
- 巴特沃斯滤波器(Butterworth Filter) — 去除指定频率以上噪声的低通滤波器
- 高斯平滑 — 通过周围帧的加权平均来缓解抖动
但过度平滑会导致动作的细节和冲击力丧失,因此必须设置适当的强度,避免将挥剑瞬间的锐利动作也模糊掉。
标记点交换校正
找到第6步中描述的标记点交换发生的区间,手动纠正标签。在Motive中,可以在时间线上直观地查看和校正标记点轨迹。
重定向(Retargeting)
将捕捉到的骨骼数据应用于不同体型比例的角色的过程。例如,要将170cm演员的动作数据应用于3m的巨人角色或150cm的儿童角色,需要在保持关节旋转的同时,根据目标角色重新计算骨骼长度。MotionBuilder、Maya、Unreal Engine等提供重定向功能。
第10步:现场常见问题及应对方法
即便看似技术完美的光学动捕,在实际现场也会遇到各种问题。
杂散反射(Stray Reflections)
红外线从标记点以外的物体反射,产生虚假标记点(Ghost Marker)的现象。
- 原因:金属表面、闪亮的衣服、眼镜、手表、地板反射等
- 应对:用哑光胶带覆盖反射表面,或在Motive中对该区域进行遮罩(Masking)处理,使软件忽略该区域
标记点脱落
剧烈运动中标记点从服装上脱落或位置偏移。
- 应对:拍摄前仔细检查标记点的粘贴状态;进行剧烈动作捕捉时,同时使用魔术贴 + 双面胶带增强固定力
- 中途监控标记点状态也很重要
服装限制
拍摄时演员穿的衣服理想选择是浅色、哑光材质。黑色不影响标记点反射,但闪亮材质或宽松衣物会导致标记点位置不稳定或产生杂散反射。穿戴专用动捕服是最稳定的选择。
标定维护
捕捉体积内的温度变化、摄像头振动、三脚架微小移动等因素可能导致标定逐渐偏移。长时间拍摄时,建议中途进行重新标定,或使用Motive的Continuous Calibration(持续标定)功能进行实时校正。
延迟 — 从动作到屏幕需要多久?
管线各阶段的耗时如下。
| 阶段 | 耗时 |
|---|---|
| 摄像头曝光(以240fps为基准) | 约4.2ms |
| 摄像头内部处理(质心计算) | 约0.5~1ms |
| 网络传输(PoE → PC) | < 1ms |
| 3D重建 + 标注 | 约1~2ms |
| 骨骼解算 | 约0.5~1ms |
| 串流输出(NatNet) | < 1ms |
| 总端到端延迟 | 约8~14ms(以240fps为基准) |
在360fps下,曝光时间缩短,延迟可降至7ms以下。这样的延迟水平人类几乎无法感知,即使在VTuber直播中也能实现自然的实时响应。
注:延迟的大部分来自摄像头曝光时间(帧周期)。这就是帧率越高延迟越低的原因。
完整管线总结
30台摄像头环形布置,IR通过滤光片仅检测红外线,硬件同步实现μs级精度
一根Cat6线缆同时传输电力和数据,以星型拓扑连接至交换机
IR LED发射 → 接收标记点反射光 → 阈值处理 → 斑点检测 → 亚像素质心计算 → 仅传输坐标
通过挥棒获取摄像头内参/外参,通过地面参考定义坐标系
从多台摄像头的2D坐标射出射线交叉 + 最小二乘法重建3D坐标
模板匹配 + 预测追踪为每个3D点分配标记点名称
基于T-Pose + ROM标定,通过逆运动学计算关节位置与旋转
通过NatNet/VRPN实时传输至Unity/Unreal/MotionBuilder,录制为FBX/BVH/C3D
间隙填充 · 平滑 · 标记点交换校正 · 重定向
应用于游戏过场动画 · VTuber直播 · 视频内容(总延迟约8~14ms)
摄像头拍摄的图像并不是直接发送到PC的——而是由摄像头自行计算标记点坐标后发送,PC将这些坐标重建为3D并映射到骨骼上。这就是光学动作捕捉的核心原理。
常见问题(FAQ)
Q. 光学动作捕捉摄像头和普通摄像头有什么区别?
普通摄像头拍摄全彩视频,而动作捕捉摄像头专注于红外(IR)光谱。它们用IR LED照射标记点并仅检测反射光,在摄像头内部直接计算标记点的2D坐标,只向PC传输坐标数据。
Q. PoE线缆长度有限制吗?
根据以太网标准,PoE线缆最长支持100m。大多数动作捕捉工作室完全在此范围内。
Q. 摄像头帧率是不是越高越好?
更高的帧率有利于快速动作追踪和降低延迟,但数据处理量会增加,摄像头分辨率可能会降低。通常VTuber直播和游戏动作捕捉120~240fps就已足够,而体育科学等超高速动作分析则使用360fps或更高。
Q. 标记点交换发生的频率有多高?
如果标记点集设计良好且摄像头数量充足,实时拍摄中交换现象很少发生。但在快速动作或标记点间距较近的动作(如双手合十等)中概率会增加,这些区间在后处理中校正。
Q. 三角测量2台就够了,为什么要安装30台?
2台只是理论最小值。实际上需要考虑遮挡(标记点被挡住)、不同摄像头角度导致的精度差异、冗余保障等因素。布置30台后,任何标记点都始终被多台摄像头观测,能够实现稳定精确的追踪。
Q. 多久需要进行一次标定?
通常在每个拍摄日开始前进行一次。但长时间拍摄时,温度变化或摄像头微小移动可能导致标定偏移,因此4~6小时连续拍摄时建议中途重新标定。使用OptiTrack Motive的Continuous Calibration功能,即使在拍摄过程中也能进行实时校正。
Q. 不能穿闪亮的衣服吗?
由于动作捕捉摄像头检测的是红外反射,闪亮材质(金属装饰、亮片、有光泽的合成纤维等)可能反射红外线并产生虚假标记点(Ghost Marker)。穿戴专用动捕服或哑光材质的舒适衣物是最佳选择。